
Quadcopter FX Simulator
ទិញនៅក្នុងកម្មវិធី

4.0star
ការវាយតម្លៃ 23.4 ពាន់info
1 លាន+
ការទាញយក

PEGI 3
info








អំពីហ្គេមនេះ
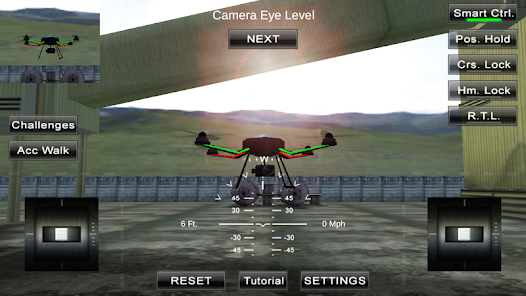
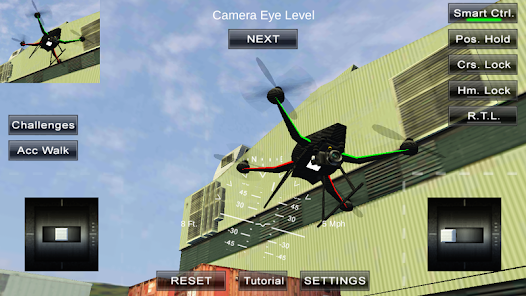
ការក្លែងធ្វើ Quadcopter / Multirotor ពី RC Drone ដោយមានដំបូងបុគ្គល,,,, របៀប Acro 3D និងជាច្រើនទៀតមើល (FPV) HUD ត្រឡប់មកផ្ទះវិញចាក់សោទំព័រដើមចាក់សោវគ្គសិក្សាកាមេរ៉ា Gimbal, របៀប Acro ..
ឥឡូវនេះក្រុមហ៊ុន Google បានរកដាសរឹង VR ត្រូវបានគាំទ្រផងដែរសម្រាប់ការហោះផ្ដោតនិងបទពិសោធ FPV ។
ការគាំទ្រសម្រាប់ការគ្រប់គ្រង
សូមចំណាំថាការក្លែងធ្វើជាមួយនិងមិនមែនជាការប្រកួតមួយនេះ។ វាត្រូវបានរចនាឡើងសម្រាប់ការយ៉ាងអន្ទះអន្ទែងពី RC អនុវត្តជំនាញហោះ។
ការបង្រៀនសិក្សាជាមូលដ្ឋានសម្រាប់ការចាប់ផ្តើមគឺនៅក្នុងវីដេអូពិពណ៌នាខាងលើ។
ដំណោះស្រាយអប្បបរមាអេក្រង់ដែលបានទាមទារគឺ 800 x 480 ភិចសែល។ RAM ទំហំដែលបានផ្ដល់អនុសាសន៍អប្បបរមាគឺ 1 ជីកាបៃ។ យើងបើកចំហចំពោះការផ្ដល់យោបល់និងបញ្ហា។ អ្នកអាចផ្ញើអ៊ីមែលមកយើងតែងតែគាំទ្រអ៊ីម៉ែលរបស់យើង។
លក្ខណៈពិសេស:
1) ដោយផ្អែកលើគំរូរូបវិទ្យាពិតនៃ Quadcopter
2) ការជ្រើសរើសរបៀបអន្តរកម្មម៉ាស៊ីនថតផ្សេងគ្នា:
* កម្រិតកាមេរ៉ាភ្នែក
* ជាលើកដំបូងបុគ្គលមើលកាមេរ៉ា
* ស្ថិរភាពកាមេរ៉ា Gimbal
* តាមកាមេរ៉ា
អ្នកអាចដើរនៅជុំវិញខណៈពេលដែលហោះសម្លឹងមើលបំពាក់ quad ទាំងដោយអូសពាក់កណ្តាលនៃអេក្រង់ឬដោយធ្វើឱ្យប៊ូតុងល្បឿននៅខាងឆ្វេងក្នុងរបៀបកាមេរ៉ាកម្រិតភ្នែក ..
3) ត្រឡប់ទៅទីតាំង (RTL)
នៅពេលដែលប្រើថ្នាំ Quad នឹងត្រឡប់ដោយស្វ័យប្រវត្តិនិងដីមកវិញនៅក្នុងទីតាំងដីរបស់ខ្លួន។ វានឹងប្ដូរដោយស្វ័យប្រវត្តិនៅពេលដែលអ្នកប្រើថ្នាំ Quad ចេញពីជួរ។
4) ទីតាំងផ្អាក
ពេលនៅលើអ្នកប្រើថ្នាំ Quad នឹងព្យាយាមដើម្បីកាន់តំណែងរបស់ខ្លួននៅពេលដែលការត្រួតពិនិត្យទាំងពីរត្រូវបានដំបងបានចេញផ្សាយ។
5) វគ្គចាក់សោ
ពេលនៅលើឆ្ពោះទៅមុខទៅក្រោយទៅឆ្វេងនិងស្តាំនឹងនៅដដែលដោយមិនគិតពីនិន្នាការនៃការប្រើថ្នាំ Quad ។ ឧទា ការផ្លាស់ប្តូរឈើស្តាំមុខនឹងតែងតែធ្វើឱ្យអ្នកប្រើថ្នាំ Quad ទៅមុខនៅភាគខាងកើតទិសដៅបើទោះបីជាខ្លួនរបស់វាចង្អុលឆ្ពោះទៅរកទិសខាងជើង។
6) ដើមចាក់សោ
ពេលនៅលើឆ្ពោះទៅមុខនឹងតែងតែចាកឆ្ងាយពីអ្នកនិងថយក្រោយនឹងតែងតែឆ្ពោះទៅរកអ្នកដោយមិនគិតពីប្រើថ្នាំ Quad ទិស។
7) ដឹកនាំបង្ហាញ (HUD)
ការបង្ហាញពេលវេលាពិតប្រាកដទីលាន, រមៀល, ក្បាលកម្ពស់, និងល្បឿន។
8) ការត្រួតពិនិត្យលៃតម្រូវការកំណត់ភាពប្រែប្រួល
9) លៃតម្រូវដោយស្វ័យប្រវត្តិរក្សាស្ថិរភាព
10) សង្កត់កម្ពស់ប្តូរ
ប្រសិនបើមាននៅលើបន្ទះឈីប quad នឹងព្យាយាមដើម្បីរក្សាកំពស់ពេលដែលវាត្រូវបានគេបើក។
11) ការកំណត់កម្រិតខ្ពស់
ប្រសិនបើអ្នកប្រើបានអនុញ្ញាតអាចផ្លាស់ប្តូរ, ឋិតិវន្តសម្រុក / ថាមវន្តការកំណត់ PID សរុបទម្ងន់និងតម្លៃអូសឌីណា។
12) ការជ្រើសរើសប្រើថ្នាំ Quad / ឈុតឆាកជាច្រើន / ការប្រឈមជាមូលដ្ឋានមួយចំនួនសម្រាប់ពេលលេខសំងាត់ ..
13) របៀបបញ្ចូលការគាំទ្រច្រើន។
ឥឡូវនេះវាគាំទ្ររបៀប 1 របៀប 2 ។ mode3, mode4 និង accelerometer ។ អ្នកអាចផ្លាស់ប្តូរបានតាមរយៈទំព័រការកំណត់
14) ការបង្វិលកាមេរ៉ាក្នុង FPV និងកាមេរ៉ា Gimbal ។
ចុចហើយអូសចេញពីកណ្តាលនៃអេក្រង់នៅលើ FPV ឬកាមេរ៉ា Gimbal ។ ចុចទ្វេរដងនៅក្នុងមជ្ឈមណ្ឌលដើម្បីកំណត់។
15) ខ្យល់ថាមវន្ត
ផលប៉ះពាល់ខ្យល់នឹងកាត់បន្ថយនៅពេលដែលនៅពីក្រោយអគារនេះ។
16) ការគាំទ្រ Google សម្រាប់ជាការពិតក្រដាសកាតុងធ្វើកេសផ្ដោតនិម្មិតនិងបទពិសោធន៍ FPV ។
សូមប្រាកដថាអ្នកមានឧបករណ៍បញ្ជាដែលបានភ្ជាប់ទៅកាន់ឧបករណ៍មួយដោយសារតែវិធីតែមួយគត់ដែលអ្នកអាចត្រួតពិនិត្យ quadcopter គឺដោយឧបករណ៍បញ្ជានៅពេលដែលដាសរឹង VR ត្រូវបានអនុញ្ញាត។ បន្ទាប់ពីបើកដែលអ្នកត្រូវបានសំឡឹងមើលប៊ូតុងនៅលើចំណុចប្រទាក់អ្នកប្រើនិងចុចប៊ូតុងកេះនៅលើក្រដាសកាតុងធ្វើកេសនោះទៅលើវា។ ពេលអ្នកត្រូវបានហោះហើរបន្ទាប់មកចុចការកេះដែលបាននៅគ្រប់ទីកន្លែងនឹងបើកទំព័រការកំណត់។ អ្នកក៏អាចប៉ះនៅលើអេក្រង់នៅកន្លែងណាមួយក្នុងការប្រតិបត្តិរបស់ព្រឹត្តិការណ៍កេះជំនួសឱ្យការចុចប៊ូតុងកេះនេះ។
17) អតិបរមា Tilt មុំ / ដោយស្វ័យប្រវត្តិគ្រាប់រំកិលឋិតថេរអក្សរតូចធំ
នៅក្នុងរបៀបធម្មតាគ្រាប់រំកិលផ្លាស់ប្តូរការកំណត់មុំអតិបរមាផ្អៀង។ ការកំណត់នេះកំណត់មុំវិលជុំ / ទីលានអតិបរមា quadcopter នឹង tilt ។ ក្នុងរបៀបកីឡាវាផ្លាស់ប្តូរដោយស្វ័យប្រវត្តិមានស្ថិរភាពការប្រែប្រួល។ ការកំណត់នេះខ្ពស់ជាងកម្លាំងច្រើនជាងនេះត្រូវបានអនុវត្តដើម្បីស្ថិរភាព quadcopter នេះ។
18) របៀប 3d Acro / Acro សម្រាប់អ្នកជំនាញផ្នែកហោះ
មានស្ថេរភាពដោយស្វ័យប្រវត្តិនឹងមិនត្រូវបានអនុវត្តនៅក្នុងរបៀបនេះ។ អ្នកត្រូវតែមានអ្នកជំនាញខាងហោះហើរនៅក្នុងរបៀបនេះគឺជា 3D mode.In របៀបដែលក្នុង Quadcopter អាចហោះចិត្តសប្បុរសដោយអាស្រ័យធ្លាក់ចុះផងដែរ។ បិទបើកដំបងនឹងផលិតផ្ទុយសម្រុកពេលដែលបានផ្លាស់ប្តូរចុះពីទីតាំងកណ្ដាលនោះទេ។
សូមរីករាយជាមួយការហោះ ..
សេវាឥណទាន: មាតិកា Arteria មួយចំនួនកំពុងស្ថិតនៅក្នុងការប្រើប្រាស់។
ឥឡូវនេះក្រុមហ៊ុន Google បានរកដាសរឹង VR ត្រូវបានគាំទ្រផងដែរសម្រាប់ការហោះផ្ដោតនិងបទពិសោធ FPV ។
ការគាំទ្រសម្រាប់ការគ្រប់គ្រង
សូមចំណាំថាការក្លែងធ្វើជាមួយនិងមិនមែនជាការប្រកួតមួយនេះ។ វាត្រូវបានរចនាឡើងសម្រាប់ការយ៉ាងអន្ទះអន្ទែងពី RC អនុវត្តជំនាញហោះ។
ការបង្រៀនសិក្សាជាមូលដ្ឋានសម្រាប់ការចាប់ផ្តើមគឺនៅក្នុងវីដេអូពិពណ៌នាខាងលើ។
ដំណោះស្រាយអប្បបរមាអេក្រង់ដែលបានទាមទារគឺ 800 x 480 ភិចសែល។ RAM ទំហំដែលបានផ្ដល់អនុសាសន៍អប្បបរមាគឺ 1 ជីកាបៃ។ យើងបើកចំហចំពោះការផ្ដល់យោបល់និងបញ្ហា។ អ្នកអាចផ្ញើអ៊ីមែលមកយើងតែងតែគាំទ្រអ៊ីម៉ែលរបស់យើង។
លក្ខណៈពិសេស:
1) ដោយផ្អែកលើគំរូរូបវិទ្យាពិតនៃ Quadcopter
2) ការជ្រើសរើសរបៀបអន្តរកម្មម៉ាស៊ីនថតផ្សេងគ្នា:
* កម្រិតកាមេរ៉ាភ្នែក
* ជាលើកដំបូងបុគ្គលមើលកាមេរ៉ា
* ស្ថិរភាពកាមេរ៉ា Gimbal
* តាមកាមេរ៉ា
អ្នកអាចដើរនៅជុំវិញខណៈពេលដែលហោះសម្លឹងមើលបំពាក់ quad ទាំងដោយអូសពាក់កណ្តាលនៃអេក្រង់ឬដោយធ្វើឱ្យប៊ូតុងល្បឿននៅខាងឆ្វេងក្នុងរបៀបកាមេរ៉ាកម្រិតភ្នែក ..
3) ត្រឡប់ទៅទីតាំង (RTL)
នៅពេលដែលប្រើថ្នាំ Quad នឹងត្រឡប់ដោយស្វ័យប្រវត្តិនិងដីមកវិញនៅក្នុងទីតាំងដីរបស់ខ្លួន។ វានឹងប្ដូរដោយស្វ័យប្រវត្តិនៅពេលដែលអ្នកប្រើថ្នាំ Quad ចេញពីជួរ។
4) ទីតាំងផ្អាក
ពេលនៅលើអ្នកប្រើថ្នាំ Quad នឹងព្យាយាមដើម្បីកាន់តំណែងរបស់ខ្លួននៅពេលដែលការត្រួតពិនិត្យទាំងពីរត្រូវបានដំបងបានចេញផ្សាយ។
5) វគ្គចាក់សោ
ពេលនៅលើឆ្ពោះទៅមុខទៅក្រោយទៅឆ្វេងនិងស្តាំនឹងនៅដដែលដោយមិនគិតពីនិន្នាការនៃការប្រើថ្នាំ Quad ។ ឧទា ការផ្លាស់ប្តូរឈើស្តាំមុខនឹងតែងតែធ្វើឱ្យអ្នកប្រើថ្នាំ Quad ទៅមុខនៅភាគខាងកើតទិសដៅបើទោះបីជាខ្លួនរបស់វាចង្អុលឆ្ពោះទៅរកទិសខាងជើង។
6) ដើមចាក់សោ
ពេលនៅលើឆ្ពោះទៅមុខនឹងតែងតែចាកឆ្ងាយពីអ្នកនិងថយក្រោយនឹងតែងតែឆ្ពោះទៅរកអ្នកដោយមិនគិតពីប្រើថ្នាំ Quad ទិស។
7) ដឹកនាំបង្ហាញ (HUD)
ការបង្ហាញពេលវេលាពិតប្រាកដទីលាន, រមៀល, ក្បាលកម្ពស់, និងល្បឿន។
8) ការត្រួតពិនិត្យលៃតម្រូវការកំណត់ភាពប្រែប្រួល
9) លៃតម្រូវដោយស្វ័យប្រវត្តិរក្សាស្ថិរភាព
10) សង្កត់កម្ពស់ប្តូរ
ប្រសិនបើមាននៅលើបន្ទះឈីប quad នឹងព្យាយាមដើម្បីរក្សាកំពស់ពេលដែលវាត្រូវបានគេបើក។
11) ការកំណត់កម្រិតខ្ពស់
ប្រសិនបើអ្នកប្រើបានអនុញ្ញាតអាចផ្លាស់ប្តូរ, ឋិតិវន្តសម្រុក / ថាមវន្តការកំណត់ PID សរុបទម្ងន់និងតម្លៃអូសឌីណា។
12) ការជ្រើសរើសប្រើថ្នាំ Quad / ឈុតឆាកជាច្រើន / ការប្រឈមជាមូលដ្ឋានមួយចំនួនសម្រាប់ពេលលេខសំងាត់ ..
13) របៀបបញ្ចូលការគាំទ្រច្រើន។
ឥឡូវនេះវាគាំទ្ររបៀប 1 របៀប 2 ។ mode3, mode4 និង accelerometer ។ អ្នកអាចផ្លាស់ប្តូរបានតាមរយៈទំព័រការកំណត់
14) ការបង្វិលកាមេរ៉ាក្នុង FPV និងកាមេរ៉ា Gimbal ។
ចុចហើយអូសចេញពីកណ្តាលនៃអេក្រង់នៅលើ FPV ឬកាមេរ៉ា Gimbal ។ ចុចទ្វេរដងនៅក្នុងមជ្ឈមណ្ឌលដើម្បីកំណត់។
15) ខ្យល់ថាមវន្ត
ផលប៉ះពាល់ខ្យល់នឹងកាត់បន្ថយនៅពេលដែលនៅពីក្រោយអគារនេះ។
16) ការគាំទ្រ Google សម្រាប់ជាការពិតក្រដាសកាតុងធ្វើកេសផ្ដោតនិម្មិតនិងបទពិសោធន៍ FPV ។
សូមប្រាកដថាអ្នកមានឧបករណ៍បញ្ជាដែលបានភ្ជាប់ទៅកាន់ឧបករណ៍មួយដោយសារតែវិធីតែមួយគត់ដែលអ្នកអាចត្រួតពិនិត្យ quadcopter គឺដោយឧបករណ៍បញ្ជានៅពេលដែលដាសរឹង VR ត្រូវបានអនុញ្ញាត។ បន្ទាប់ពីបើកដែលអ្នកត្រូវបានសំឡឹងមើលប៊ូតុងនៅលើចំណុចប្រទាក់អ្នកប្រើនិងចុចប៊ូតុងកេះនៅលើក្រដាសកាតុងធ្វើកេសនោះទៅលើវា។ ពេលអ្នកត្រូវបានហោះហើរបន្ទាប់មកចុចការកេះដែលបាននៅគ្រប់ទីកន្លែងនឹងបើកទំព័រការកំណត់។ អ្នកក៏អាចប៉ះនៅលើអេក្រង់នៅកន្លែងណាមួយក្នុងការប្រតិបត្តិរបស់ព្រឹត្តិការណ៍កេះជំនួសឱ្យការចុចប៊ូតុងកេះនេះ។
17) អតិបរមា Tilt មុំ / ដោយស្វ័យប្រវត្តិគ្រាប់រំកិលឋិតថេរអក្សរតូចធំ
នៅក្នុងរបៀបធម្មតាគ្រាប់រំកិលផ្លាស់ប្តូរការកំណត់មុំអតិបរមាផ្អៀង។ ការកំណត់នេះកំណត់មុំវិលជុំ / ទីលានអតិបរមា quadcopter នឹង tilt ។ ក្នុងរបៀបកីឡាវាផ្លាស់ប្តូរដោយស្វ័យប្រវត្តិមានស្ថិរភាពការប្រែប្រួល។ ការកំណត់នេះខ្ពស់ជាងកម្លាំងច្រើនជាងនេះត្រូវបានអនុវត្តដើម្បីស្ថិរភាព quadcopter នេះ។
18) របៀប 3d Acro / Acro សម្រាប់អ្នកជំនាញផ្នែកហោះ
មានស្ថេរភាពដោយស្វ័យប្រវត្តិនឹងមិនត្រូវបានអនុវត្តនៅក្នុងរបៀបនេះ។ អ្នកត្រូវតែមានអ្នកជំនាញខាងហោះហើរនៅក្នុងរបៀបនេះគឺជា 3D mode.In របៀបដែលក្នុង Quadcopter អាចហោះចិត្តសប្បុរសដោយអាស្រ័យធ្លាក់ចុះផងដែរ។ បិទបើកដំបងនឹងផលិតផ្ទុយសម្រុកពេលដែលបានផ្លាស់ប្តូរចុះពីទីតាំងកណ្ដាលនោះទេ។
សូមរីករាយជាមួយការហោះ ..
សេវាឥណទាន: មាតិកា Arteria មួយចំនួនកំពុងស្ថិតនៅក្នុងការប្រើប្រាស់។
បានដំឡើងកំណែនៅ
សុវត្ថិភាពចាប់ផ្ដើមពីការយល់ដឹងអំពីរបៀបដែលអ្នកអភិវឌ្ឍន៍ប្រមូល និងចែករំលែកទិន្នន័យរបស់អ្នក។ ការអនុវត្តចំពោះសន្តិសុខ និងឯកជនភាពទិន្នន័យអាចខុសគ្នាទៅតាមការប្រើប្រាស់ តំបន់ និងអាយុរបស់អ្នក។ អ្នកអភិវឌ្ឍន៍បានផ្ដល់ព័ត៌មាននេះ និងអាចធ្វើបច្ចុប្បន្នភាពវានៅពេលខាងមុខ។

មិនចែករំលែកទិន្នន័យជាមួយភាគីទីបីឡើយ
ស្វែងយល់បន្ថែមអំពីរបៀបដែលអ្នកអភិវឌ្ឍន៍ប្រកាសអំពីការចែករំលែកទិន្នន័យ

មិនប្រមូលទិន្នន័យឡើយ
ស្វែងយល់បន្ថែមអំពីរបៀបដែលអ្នកអភិវឌ្ឍន៍ប្រកាសអំពីការប្រមូលទិន្នន័យ
ការដាក់ផ្កាយ និងមតិវាយតម្លៃ
4.0
ការវាយតម្លៃ 19.7 ពាន់

អ្នកប្រើ Google
- សម្គាល់ថាមិនសមរម្យ
- បង្ហាញប្រវត្តិនៃការវាយតម្លៃ
10 ធ្នូ 2018
ល្អបំផុត
មនុស្ស 2 នាក់បានយល់ថាការវាយតម្លៃនេះមានប្រយោជន៍

BRO S1K
- សម្គាល់ថាមិនសមរម្យ
6 មិថុនា 2021
Loy nas all bro n sis 👍🥰
មនុស្ស 1 នាក់បានយល់ថាការវាយតម្លៃនេះមានប្រយោជន៍
អ្នកប្រើ Google
- សម្គាល់ថាមិនសមរម្យ
23 កុម្ភៈ 2020
OK
មនុស្ស 3 នាក់បានយល់ថាការវាយតម្លៃនេះមានប្រយោជន៍
ជំនួយកម្មវិធី
អំពីអ្នកអភិវឌ្ឍន៍
3D CREATIVE WORLD
First Floor, D 96, Village Munirka
New Delhi, Delhi 110067
India
+91 88022 88868





