
Quadcopter FX Simulator Pro

4.7star
ការវាយតម្លៃ 589info
10 ពាន់+
ការទាញយក

PEGI 3
info








អំពីហ្គេមនេះ
ការក្លែងធ្វើ Quadcopter / Multirotor ពី RC ដាច់អហង្កាដោយមានដំបូងបុគ្គល,,,, របៀប Acro 3D និងជាច្រើនទៀតមើល (FPV) HUD ត្រឡប់មកផ្ទះវិញចាក់សោទំព័រដើមចាក់សោវគ្គកាមេរ៉ា Gimbal, របៀប Acro ..
ឥឡូវនេះក្រុមហ៊ុន Google បានរកដាសរឹង VR ត្រូវបានគាំទ្រផងដែរសម្រាប់ការហោះផ្ដោតនិងបទពិសោធ FPV ។
ការគាំទ្រសម្រាប់ការគ្រប់គ្រង
នេះគឺជាកំណែដែលបានគាំទ្រការក្លែងធ្វើការ QuadcopterFX របស់យើង។ មានការទិញគ្មាន inapp មាន។ អ្វីគ្រប់យ៉ាងត្រូវបានបើកនៅក្នុងការចំណាយទាប។ អ្នកប្រើប្រាស់លើកដំបូងដែលអាចព្យាយាមដោយឥតគិត Quadcopter ក្លែងធ្វើរបស់យើងឱ្យរបស់ FX បានឃើញប្រសិនបើរឿងគ្រប់ធ្វើការបានយ៉ាងល្អ។
/store/apps/details?id=com.Creativeworld.QuadcopterFX
ដំណោះស្រាយអប្បបរមាអេក្រង់ទាមទារគឺ 800 x 480 ភិចសែល។ RAM ទំហំដែលបានផ្ដល់អនុសាសន៍អប្បបរមាគឺ 1 ជីកាបៃបើទោះបីជាយើងបានឃើញវារត់ដោយជោគជ័យនៅលើ RAM ទំហំ 512MB ។ យើងបើកចំហចំពោះការផ្ដល់យោបល់និងបញ្ហា។ អ្នកអាចផ្ញើអ៊ីមែលមកយើងតែងតែគាំទ្រអ៊ីម៉ែលរបស់យើង។
លក្ខណៈពិសេស:
1) ដោយផ្អែកលើគំរូក្នុងរូបវិទ្យាពិតនៃ Quadcopter
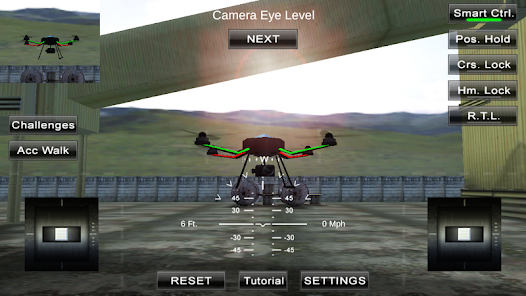
2) ការជ្រើសរើសអន្តរកម្មនៃរបៀបម៉ាស៊ីនថតផ្សេងគ្នា:
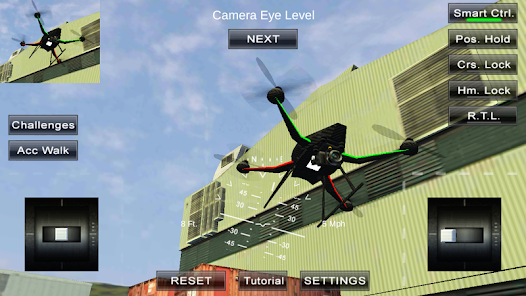
* កម្រិតកាមេរ៉ាភ្នែក
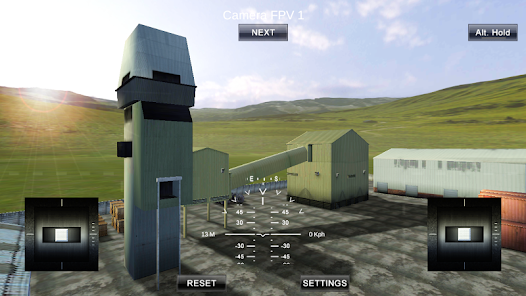
* ជាលើកដំបូងបុគ្គលមើលកាមេរ៉ា
* ស្ថិរភាពកាមេរ៉ា Gimbal
* តាមកាមេរ៉ា
អ្នកអាចដើរនៅជុំវិញខណៈពេលដែលហោះសម្លឹងមើលបំពាក់ quad ដែរដោយអូសពាក់កណ្តាលនៃអេក្រង់ឬដោយធ្វើឱ្យប៊ូតុងល្បឿននៅលើផ្នែកខាងឆ្វេងដែលនៅក្នុងរបៀបកាមេរ៉ាកម្រិតភ្នែក ..
3) ការវិលត្រឡប់ទៅទីតាំង (RTL បាន)
នៅពេលដែលប្រើថ្នាំ Quad នេះនឹងវិលត្រឡប់មកវិញដោយស្វ័យប្រវត្តិនិងដីធ្លីមកវិញនៅក្នុងទីតាំងដីរបស់ខ្លួន។ វានឹងផ្លាស់ប្តូរដោយស្វ័យប្រវត្តិនៅលើនៅពេលអ្នកប្រើថ្នាំ Quad ចេញពីជួរ។
4) ទីតាំងរង់ចាំ
នៅពេលដែលការប្រើថ្នាំ Quad នឹងស្តីការព្យាយាមក្នុងការកាន់តំណែងរបស់ខ្លួននៅពេលការត្រួតពិនិត្យទាំងពីរនេះត្រូវដំបងចេញផ្សាយ។
5) វគ្គចាក់សោ
ពេលដែលនៅលើឆ្ពោះទៅមុខទៅក្រោយទៅឆ្វេងនិងស្តាំនឹងនៅដដែលដោយមិនគិតពីការតម្រង់ទិសនៃថ្នាំ Quad ។ ឧទាហរ ការផ្លាស់ប្តូរខាងស្តាំទៅមុខនឹងឈើការធ្វើឱ្យអ្នកប្រើថ្នាំ Quad តែងតែចូលទៅមុខនៅក្នុងទិសភាគខាងកើតរបស់ខ្លួនបានចង្អុលបើទោះបីជាការឆ្ពោះទៅរកទិសខាងជើង។
6) ដើមចាក់សោ
នៅពេលដែលការលើខ្សែប្រយុទ្ធនឹងតែងតែនៅឆ្ងាយពីអ្នករាល់គ្នាហើយថយក្រោយនឹងតែងតែឆ្ពោះទៅរកអ្នកដោយមិនគិតពីប្រភេទ quad ការតំរង់ទិស។
7) បានដឹកនាំឡើងបង្ហាញ (HUD)
ការបង្ហាញពេលវេលាពិតប្រាកដទីលាន, រមៀល, ក្បាលកម្ពស់, និងល្បឿន។
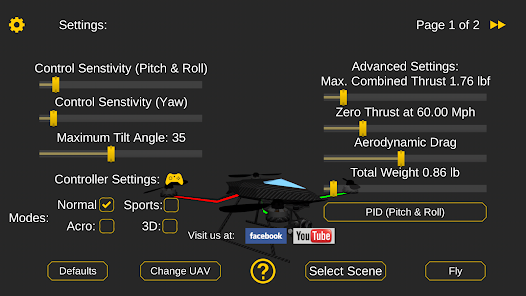
8) ការត្រួតពិនិត្យការលៃតម្រូវការកំណត់ភាពប្រែប្រួល
9) ការលៃតម្រូវដោយស្វ័យប្រវត្តិស្ថេរភាព
10) រង់ចាំកម្ពស់ប្ដូរ
ប្រសិនបើមាននៅលើបន្ទះឈីប quad នឹងព្យាយាមដើម្បីរក្សាកំពស់ពេលដែលវាត្រូវបានបើក។
11) ការកំណត់កម្រិតខ្ពស់
ប្រសិនបើអ្នកប្រើបានអនុញ្ញាតអាចផ្លាស់ប្តូរបាន, ឋិតិសម្រុក / ថាមវន្តកំណត់ PID សរុបទំងន់និងតម្លៃអូសឌីណា។
12) ការជ្រើសរើសប្រើថ្នាំ Quad / ខារ៉ាអូខេច្រើន / ការប្រឈមជាមូលដ្ឋានមួយចំនួនសម្រាប់ពេលវេលាលេខសំងាត់ ..
13) របៀបបញ្ចូលការគាំទ្រច្រើន។
ឥឡូវនេះវាគាំទ្ររបៀប 1 របៀប 2 ។ mode3, mode4 និងល្បឿន។ អ្នកអាចផ្លាស់ប្តូរបានតាមរយៈទំព័រការកំណត់
14) ការបង្វិលកាមេរ៉ាក្នុង FPV និងកាមេរ៉ា Gimbal ។
ចុចហើយអូសពីកណ្តាលនៅលើអេក្រង់ FPV ឬកាមេរ៉ា Gimbal ។ ចុចទ្វេរដងនៅក្នុងមជ្ឈមណ្ឌលមួយដើម្បីកំណត់ឡើងវិញ។
15) ខ្យល់ថាមវន្ត
ផលប៉ះពាល់ខ្យល់នឹងកាត់បន្ថយនៅពេលដែលនៅពីក្រោយអគារនេះ។
16) ការគាំទ្រក្រដាសកាតុង Google សម្រាប់ជាការពិតនិម្មិតនិងបទពិសោធ FPV ការផ្ដោត។
សូមប្រាកដថាអ្នកមានឧបករណ៍បញ្ជាដែលបានភ្ជាប់ទៅកាន់ឧបករណ៍មួយដោយសារតែវិធីតែមួយគត់ដែលអ្នកអាចត្រួតពិនិត្យ quadcopter គឺដោយឧបករណ៍បញ្ជានៅពេលដែលដាសរឹង VR ត្រូវបានអនុញ្ញាត។ បន្ទាប់ពីការធ្វើឱ្យអ្នកមានដើម្បីមើលប៊ូតុងនៅលើចំណុចប្រទាក់អ្នកប្រើហើយចុចប៊ូតុងនៅលើក្រដាសកាតុងគន្លឹះដើម្បីចុចលើវា។ នៅពេលដែលអ្នកកំពុងហោះហើរបន្ទាប់មកចុចការកេះគ្រប់ទីកន្លែងនឹងបើកទំព័រការកំណត់។ អ្នកអាចប៉ះពាល់នៅលើអេក្រង់គ្រប់ទីកន្លែងដើម្បីប្រតិបត្តិព្រឹត្ដិការណ៍គន្លឹះជំនួសឱ្យការចុចប៊ូតុងគន្លឹះនេះ។
17) អតិបរមាផ្អៀងមុំ / ដោយស្វ័យប្រវត្តិមានស្ថេរភាពប្រែប្រួលគ្រាប់រំកិល
នៅក្នុងរបៀបធម្មតាគ្រាប់រំកិលផ្លាស់ប្តូរការកំណត់មុំអតិបរមាផ្អៀង។ ការកំណត់នេះកំណត់មុំវិលជុំ / ទីលានអតិបរមា quadcopter នឹងរុញច្រានឱ្យក្លាយ។ ក្នុងរបៀបអ្នកកីឡាវាផ្លាស់ប្តូរដោយស្វ័យប្រវត្តិមានស្ថេរភាពប្រែប្រួល។ ការកំណត់នេះខ្ពស់ជាងកម្លាំងច្រើនទៀតត្រូវបានអនុវត្តដើម្បីស្ថិរភាព quadcopter នេះ។
18) របៀប 3d Acro / Acro សម្រាប់ការហោះហើរជាអ្នកជំនាញ
មានស្ថេរភាពដោយស្វ័យប្រវត្តិនឹងមិនត្រូវបានអនុវត្តនៅក្នុងរបៀបនេះ។ អ្នកត្រូវការដើម្បីត្រូវបានអ្នកជំនាញក្នុងការហោះហើរនៅក្នុងរបៀបជាលក្ខណៈ 3D mode.In នេះគឺជារបៀបដែលក្នុងនោះ Quadcopter អាចហោះចិត្តសប្បុរសដោយអាស្រ័យចុះផងដែរ។ ដំបងឈ្នាន់នឹងផលិតបញ្ច្រាសសម្រុកពេលដែលបានផ្លាស់ប្តូរចុះពីទីតាំងកណ្ដាលនោះទេ។
សូមរីករាយជាមួយការហោះ ..
សេវាឥណទាន: មាតិកា Arteria មួយចំនួនកំពុងស្ថិតនៅក្នុងការប្រើប្រាស់។
ឥឡូវនេះក្រុមហ៊ុន Google បានរកដាសរឹង VR ត្រូវបានគាំទ្រផងដែរសម្រាប់ការហោះផ្ដោតនិងបទពិសោធ FPV ។
ការគាំទ្រសម្រាប់ការគ្រប់គ្រង
នេះគឺជាកំណែដែលបានគាំទ្រការក្លែងធ្វើការ QuadcopterFX របស់យើង។ មានការទិញគ្មាន inapp មាន។ អ្វីគ្រប់យ៉ាងត្រូវបានបើកនៅក្នុងការចំណាយទាប។ អ្នកប្រើប្រាស់លើកដំបូងដែលអាចព្យាយាមដោយឥតគិត Quadcopter ក្លែងធ្វើរបស់យើងឱ្យរបស់ FX បានឃើញប្រសិនបើរឿងគ្រប់ធ្វើការបានយ៉ាងល្អ។
/store/apps/details?id=com.Creativeworld.QuadcopterFX
ដំណោះស្រាយអប្បបរមាអេក្រង់ទាមទារគឺ 800 x 480 ភិចសែល។ RAM ទំហំដែលបានផ្ដល់អនុសាសន៍អប្បបរមាគឺ 1 ជីកាបៃបើទោះបីជាយើងបានឃើញវារត់ដោយជោគជ័យនៅលើ RAM ទំហំ 512MB ។ យើងបើកចំហចំពោះការផ្ដល់យោបល់និងបញ្ហា។ អ្នកអាចផ្ញើអ៊ីមែលមកយើងតែងតែគាំទ្រអ៊ីម៉ែលរបស់យើង។
លក្ខណៈពិសេស:
1) ដោយផ្អែកលើគំរូក្នុងរូបវិទ្យាពិតនៃ Quadcopter
2) ការជ្រើសរើសអន្តរកម្មនៃរបៀបម៉ាស៊ីនថតផ្សេងគ្នា:
* កម្រិតកាមេរ៉ាភ្នែក
* ជាលើកដំបូងបុគ្គលមើលកាមេរ៉ា
* ស្ថិរភាពកាមេរ៉ា Gimbal
* តាមកាមេរ៉ា
អ្នកអាចដើរនៅជុំវិញខណៈពេលដែលហោះសម្លឹងមើលបំពាក់ quad ដែរដោយអូសពាក់កណ្តាលនៃអេក្រង់ឬដោយធ្វើឱ្យប៊ូតុងល្បឿននៅលើផ្នែកខាងឆ្វេងដែលនៅក្នុងរបៀបកាមេរ៉ាកម្រិតភ្នែក ..
3) ការវិលត្រឡប់ទៅទីតាំង (RTL បាន)
នៅពេលដែលប្រើថ្នាំ Quad នេះនឹងវិលត្រឡប់មកវិញដោយស្វ័យប្រវត្តិនិងដីធ្លីមកវិញនៅក្នុងទីតាំងដីរបស់ខ្លួន។ វានឹងផ្លាស់ប្តូរដោយស្វ័យប្រវត្តិនៅលើនៅពេលអ្នកប្រើថ្នាំ Quad ចេញពីជួរ។
4) ទីតាំងរង់ចាំ
នៅពេលដែលការប្រើថ្នាំ Quad នឹងស្តីការព្យាយាមក្នុងការកាន់តំណែងរបស់ខ្លួននៅពេលការត្រួតពិនិត្យទាំងពីរនេះត្រូវដំបងចេញផ្សាយ។
5) វគ្គចាក់សោ
ពេលដែលនៅលើឆ្ពោះទៅមុខទៅក្រោយទៅឆ្វេងនិងស្តាំនឹងនៅដដែលដោយមិនគិតពីការតម្រង់ទិសនៃថ្នាំ Quad ។ ឧទាហរ ការផ្លាស់ប្តូរខាងស្តាំទៅមុខនឹងឈើការធ្វើឱ្យអ្នកប្រើថ្នាំ Quad តែងតែចូលទៅមុខនៅក្នុងទិសភាគខាងកើតរបស់ខ្លួនបានចង្អុលបើទោះបីជាការឆ្ពោះទៅរកទិសខាងជើង។
6) ដើមចាក់សោ
នៅពេលដែលការលើខ្សែប្រយុទ្ធនឹងតែងតែនៅឆ្ងាយពីអ្នករាល់គ្នាហើយថយក្រោយនឹងតែងតែឆ្ពោះទៅរកអ្នកដោយមិនគិតពីប្រភេទ quad ការតំរង់ទិស។
7) បានដឹកនាំឡើងបង្ហាញ (HUD)
ការបង្ហាញពេលវេលាពិតប្រាកដទីលាន, រមៀល, ក្បាលកម្ពស់, និងល្បឿន។
8) ការត្រួតពិនិត្យការលៃតម្រូវការកំណត់ភាពប្រែប្រួល
9) ការលៃតម្រូវដោយស្វ័យប្រវត្តិស្ថេរភាព
10) រង់ចាំកម្ពស់ប្ដូរ
ប្រសិនបើមាននៅលើបន្ទះឈីប quad នឹងព្យាយាមដើម្បីរក្សាកំពស់ពេលដែលវាត្រូវបានបើក។
11) ការកំណត់កម្រិតខ្ពស់
ប្រសិនបើអ្នកប្រើបានអនុញ្ញាតអាចផ្លាស់ប្តូរបាន, ឋិតិសម្រុក / ថាមវន្តកំណត់ PID សរុបទំងន់និងតម្លៃអូសឌីណា។
12) ការជ្រើសរើសប្រើថ្នាំ Quad / ខារ៉ាអូខេច្រើន / ការប្រឈមជាមូលដ្ឋានមួយចំនួនសម្រាប់ពេលវេលាលេខសំងាត់ ..
13) របៀបបញ្ចូលការគាំទ្រច្រើន។
ឥឡូវនេះវាគាំទ្ររបៀប 1 របៀប 2 ។ mode3, mode4 និងល្បឿន។ អ្នកអាចផ្លាស់ប្តូរបានតាមរយៈទំព័រការកំណត់
14) ការបង្វិលកាមេរ៉ាក្នុង FPV និងកាមេរ៉ា Gimbal ។
ចុចហើយអូសពីកណ្តាលនៅលើអេក្រង់ FPV ឬកាមេរ៉ា Gimbal ។ ចុចទ្វេរដងនៅក្នុងមជ្ឈមណ្ឌលមួយដើម្បីកំណត់ឡើងវិញ។
15) ខ្យល់ថាមវន្ត
ផលប៉ះពាល់ខ្យល់នឹងកាត់បន្ថយនៅពេលដែលនៅពីក្រោយអគារនេះ។
16) ការគាំទ្រក្រដាសកាតុង Google សម្រាប់ជាការពិតនិម្មិតនិងបទពិសោធ FPV ការផ្ដោត។
សូមប្រាកដថាអ្នកមានឧបករណ៍បញ្ជាដែលបានភ្ជាប់ទៅកាន់ឧបករណ៍មួយដោយសារតែវិធីតែមួយគត់ដែលអ្នកអាចត្រួតពិនិត្យ quadcopter គឺដោយឧបករណ៍បញ្ជានៅពេលដែលដាសរឹង VR ត្រូវបានអនុញ្ញាត។ បន្ទាប់ពីការធ្វើឱ្យអ្នកមានដើម្បីមើលប៊ូតុងនៅលើចំណុចប្រទាក់អ្នកប្រើហើយចុចប៊ូតុងនៅលើក្រដាសកាតុងគន្លឹះដើម្បីចុចលើវា។ នៅពេលដែលអ្នកកំពុងហោះហើរបន្ទាប់មកចុចការកេះគ្រប់ទីកន្លែងនឹងបើកទំព័រការកំណត់។ អ្នកអាចប៉ះពាល់នៅលើអេក្រង់គ្រប់ទីកន្លែងដើម្បីប្រតិបត្តិព្រឹត្ដិការណ៍គន្លឹះជំនួសឱ្យការចុចប៊ូតុងគន្លឹះនេះ។
17) អតិបរមាផ្អៀងមុំ / ដោយស្វ័យប្រវត្តិមានស្ថេរភាពប្រែប្រួលគ្រាប់រំកិល
នៅក្នុងរបៀបធម្មតាគ្រាប់រំកិលផ្លាស់ប្តូរការកំណត់មុំអតិបរមាផ្អៀង។ ការកំណត់នេះកំណត់មុំវិលជុំ / ទីលានអតិបរមា quadcopter នឹងរុញច្រានឱ្យក្លាយ។ ក្នុងរបៀបអ្នកកីឡាវាផ្លាស់ប្តូរដោយស្វ័យប្រវត្តិមានស្ថេរភាពប្រែប្រួល។ ការកំណត់នេះខ្ពស់ជាងកម្លាំងច្រើនទៀតត្រូវបានអនុវត្តដើម្បីស្ថិរភាព quadcopter នេះ។
18) របៀប 3d Acro / Acro សម្រាប់ការហោះហើរជាអ្នកជំនាញ
មានស្ថេរភាពដោយស្វ័យប្រវត្តិនឹងមិនត្រូវបានអនុវត្តនៅក្នុងរបៀបនេះ។ អ្នកត្រូវការដើម្បីត្រូវបានអ្នកជំនាញក្នុងការហោះហើរនៅក្នុងរបៀបជាលក្ខណៈ 3D mode.In នេះគឺជារបៀបដែលក្នុងនោះ Quadcopter អាចហោះចិត្តសប្បុរសដោយអាស្រ័យចុះផងដែរ។ ដំបងឈ្នាន់នឹងផលិតបញ្ច្រាសសម្រុកពេលដែលបានផ្លាស់ប្តូរចុះពីទីតាំងកណ្ដាលនោះទេ។
សូមរីករាយជាមួយការហោះ ..
សេវាឥណទាន: មាតិកា Arteria មួយចំនួនកំពុងស្ថិតនៅក្នុងការប្រើប្រាស់។
បានដំឡើងកំណែនៅ
សុវត្ថិភាពចាប់ផ្ដើមពីការយល់ដឹងអំពីរបៀបដែលអ្នកអភិវឌ្ឍន៍ប្រមូល និងចែករំលែកទិន្នន័យរបស់អ្នក។ ការអនុវត្តចំពោះសន្តិសុខ និងឯកជនភាពទិន្នន័យអាចខុសគ្នាទៅតាមការប្រើប្រាស់ តំបន់ និងអាយុរបស់អ្នក។ អ្នកអភិវឌ្ឍន៍បានផ្ដល់ព័ត៌មាននេះ និងអាចធ្វើបច្ចុប្បន្នភាពវានៅពេលខាងមុខ។

មិនចែករំលែកទិន្នន័យជាមួយភាគីទីបីឡើយ
ស្វែងយល់បន្ថែមអំពីរបៀបដែលអ្នកអភិវឌ្ឍន៍ប្រកាសអំពីការចែករំលែកទិន្នន័យ

មិនប្រមូលទិន្នន័យឡើយ
ស្វែងយល់បន្ថែមអំពីរបៀបដែលអ្នកអភិវឌ្ឍន៍ប្រកាសអំពីការប្រមូលទិន្នន័យ
ការដាក់ផ្កាយ និងមតិវាយតម្លៃ
4.6
ការវាយតម្លៃ 474
ជំនួយកម្មវិធី
អំពីអ្នកអភិវឌ្ឍន៍
3D CREATIVE WORLD
First Floor, D 96, Village Munirka
New Delhi, Delhi 110067
India
+91 88022 88868


