
Quadcopter FX Simulator
ການຊື້ຢູ່ໃນແອັບ

4,0star
23,4 ພັນ ຄຳຕິຊົມinfo
1 ລ້ານ+
ດາວໂຫຼດ

PEGI 3
info








ກ່ຽວກັບເກມນີ້
A simulator Quadcopter / Multirotor RC Drone ທີ່ມີຄົນທໍາອິດເບິ່ງ (FPV), HUD, ກັບຄືນຫນ້າທໍາອິດ, ຂອງລາຍວິຊາ Lock, ຫນ້າທໍາອິດ Lock, ກ້ອງ Gimbal, ຮູບແບບ Acro, ຮູບແບບ 3D Acro ແລະອື່ນ ໆ ..
ໃນປັດຈຸບັນກູໂກ Cardboard VR ແມ່ນສະຫນັບສະຫນູນສໍາລັບການບິນ immersive ແລະປະສົບການ FPV.
ສະຫນັບສະຫນູນສໍາລັບການຄວບຄຸມ
ກະລຸນາສັງເກດວ່າ simulator ເປັນແລະບໍ່ນີ້ເກມໄດ້. ມັນໄດ້ຖືກອອກແບບສໍາລັບ enthusiasts RC ການຝຶກທັກເກມບິນ.
Tutorial ພື້ນຖານສໍາລັບຜູ້ເລີ່ມເປັນໃນວິດີໂອອະທິບາຍຂ້າງເທິງນີ້.
ຄວາມລະອຽດຂອງຫນ້າຈໍທີ່ຕ້ອງການຕໍາ່ສຸດທີ່ເປັນ 800 x 480 px. RAM ແນະນໍາຂັ້ນຕ່ໍາ 1 GB. ພວກເຮົາແມ່ນເປີດໃຫ້ຄໍາແນະນໍາແລະບັນຫາ. ທ່ານສະເຫມີສາມາດສົ່ງອີເມວຫາພວກເຮົາທີ່ອີເມວສະຫນັບສະຫນູນຂອງພວກເຮົາ.
ຄຸນນະສົມບັດ:
1) ອີງຕາມຕົວແບບທີ່ແທ້ຈິງຟີຊິກຂອງ Quadcopter
2) ການຄັດເລືອກຕິດຕໍ່ພົວພັນຂອງທິບາຍຮູບແບບທີ່ແຕກຕ່າງກັນກ້ອງຖ່າຍຮູບ:
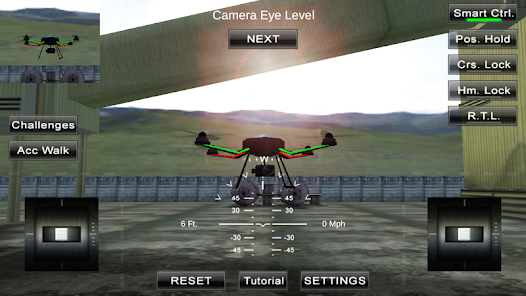
* ກ້ອງລະດັບຂອງຕາ
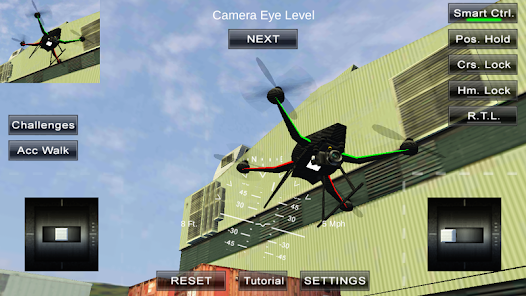
* ຄົນທໍາອິດເບິ່ງກ້ອງຖ່າຍຮູບ
* Stabilized ກ້ອງ Gimbal
* ປະຕິບັດຕາມກ້ອງ
ທ່ານສາມາດຍ່າງປະມານໃນຂະນະທີ່ເກມບິນ, ຊອກຫາຢູ່ໃນ quad ໄດ້ບໍ່ວ່າຈະໂດຍການຍ້າຍເຄິ່ງກາງຂອງຫນ້າຈໍໄດ້ຫລືໂດຍການເຮັດໃຫ້ປຸ່ມ accelerometer ໃນເບື້ອງຊ້າຍໃນຕາ Mode ກ້ອງລະດັບ ..
3) ກັບຄືນໄປສະຖານທີ່ (RTL)
ໃນເວລາທີ່ສຸດ Quad ອັດຕະໂນມັດຈະກັບຄືນແລະກັບຄືນໄປບ່ອນທີ່ດິນໃນຕໍາແຫນ່ງທີ່ດິນຂອງຕົນ. ມັນອັດຕະໂນມັດຈະສະຫຼັບໃນເວລາທີ່ Quad ໄດ້ໄປອອກຈາກລະດັບ.
4) ຕໍາແຫນ່ງຖື
ໃນເວລາທີ່ ON Quad ຈະພະຍາຍາມທີ່ຈະຖືຕໍາແຫນ່ງຂອງຕົນໃນເວລາທີ່ທັງສອງໄມ້ການຄວບຄຸມຖືກປ່ອຍອອກມາ.
5) ຂອງລາຍວິຊາ Lock
ໃນເວລາທີ່ສຸດໄປຂ້າງຫນ້າໄດ້, ຖອຍຫລັງ, ຊ້າຍແລະຂວາຈະຍັງຄົງຄືບໍ່ສົນເລື່ອງຂອງປະຖົມນິເທດຂອງ Quad. ຕົວຢ່າງ: ການເຄື່ອນຍ້າຍໄມ້ສິດທິໃນຂ້າງຫນ້າສະເຫມີຈະເຮັດໃຫ້ Quad ກ້າວໄປຂ້າງຫນ້າໃນທິດທາງຕາເວັນອອກເຖິງແມ່ນວ່າການຊີ້ຂອງຕົນໄປສູ່ພາກເຫນືອ.
6) Home Lock
ໃນເວລາທີ່ສຸດໄປຂ້າງຫນ້າໄດ້ສະເຫມີຈະໄປຈາກທ່ານແລະຫລັງສະເຫມີຈະມີຕໍ່ທ່ານໂດຍບໍ່ສົນເລື່ອງຂອງປະຖົມນິເທດ Quads.
7) ຫົວຫນ້າສະແດງຜົນ (HUD)
ການສະແດງທີ່ໃຊ້ເວລາທີ່ແທ້ຈິງ Pitch, ມ້ວນ, ຫົວລະດັບສູງ, ແລະຄວາມໄວ.
8) ການຕັ້ງຄ່າທີ່ລະອຽດອ່ອນຄວບຄຸມປັບ
9) ອັດຕະໂນມັດຄົງທີ່ຕັ້ງ
10) ຖືລະດັບຄວາມສູງສະ
ຖ້າ ON quad ໄດ້ຈະພະຍາຍາມທີ່ຈະຮັກສາລະດັບຄວາມສູງໃນເວລາທີ່ໄດ້ມີການເປີດ.
11) ການຕັ້ງຄ່າຂັ້ນສູງ
ຖ້າຫາກຜູ້ໃຊ້ເຮັດໃຫ້ສາມາດມີການປ່ຽນແປງໃນນ້ໍາຫນັກທັງຫມົດ, Static / thrust ແບບເຄື່ອນໄຫວ, ທີ່ຕັ້ງ PID ແລະຄ່າ Drag Aerodynamic.
12) ການຄັດເລືອກ Quad / Scene ຫຼາຍ / ບາງສິ່ງທ້າທາຍຂັ້ນພື້ນຖານສໍາລັບການທີ່ໃຊ້ເວລາຜ່ານ ..
13) ເພີ່ມການສະຫນັບສະຫນູນເຂົ້າຮູບແບບ.
ໃນປັດຈຸບັນມັນສະຫນັບສະຫນູນ mode1 Mode2,. mode3, mode4 ແລະ accelerometers. ທ່ານສາມາດມີການປ່ຽນແປງໂດຍຜ່ານການປັບຄ່າຫນ້າ
14) ພືດຫມູນວຽນກ້ອງໃນ FPV ແລະກ້ອງຖ່າຍຮູບ Gimbal.
ກົດແລະ drag ຈາກໃຈກາງຂອງຫນ້າຈໍສຸດ FPV ຫຼືກ້ອງຖ່າຍຮູບ Gimbal. Double ການຄລິກຢູ່ໃຈກາງການປັບ.
15) ພະລັງງານລົມແບບເຄື່ອນໄຫວ
ຜົນກະທົບພະລັງງານລົມຈະຫຼຸດຜ່ອນການໃນເວລາທີ່ທາງຫລັງຂອງການກໍ່ສ້າງ.
16) ສະຫນັບສະຫນູນ cardboard ກູໂກສໍາລັບຄວາມເປັນຈິງແລ້ວ virtual immersive ແລະປະສົບການ FPV.
ໃຫ້ແນ່ໃຈວ່າທ່ານມີການຄວບຄຸມຕິດກັບອຸປະກອນໄດ້ເນື່ອງຈາກວ່າວິທີທີ່ພຽງແຕ່ທ່ານສາມາດຄວບຄຸມ quadcopter ແມ່ນໂດຍການຄວບຄຸມຄັ້ງກະດາດ VR ຖືກເປີດໃຫ້ໃຊ້ງານ. ຫຼັງຈາກທີ່ເຮັດໃຫ້ທ່ານມີທີ່ຈະຈ້ອງເບິ່ງຢູ່ປຸ່ມຕ່າງໆກ່ຽວກັບ UI ການແລະກົດປຸ່ມຜົນກະທົບຕໍ່ໃນ cardboard ທີ່ຈະໃຫ້ຄລິກໃສ່ມັນ. ເມື່ອທ່ານກໍາລັງເກມບິນຫຼັງຈາກນັ້ນກົດຜົນກະທົບໄດ້ທຸກບ່ອນຈະເປີດຫນ້າການຕັ້ງຄ່າ. ນອກນັ້ນທ່ານຍັງສາມາດສໍາຜັດຫນ້າຈໍໄດ້ທຸກທີ່ຈະປະຕິບັດກໍລະນີຜົນກະທົບຕໍ່ແທນທີ່ຈະກົດປຸ່ມຜົນກະທົບຕໍ່.
17) ນ້ໍາອຽງ Angle / ອັດຕະໂນມັດຄົງທີ່ລະອຽດອ່ອນ Slider
ໃນ Normal Mode ເລື່ອນການປ່ຽນແປງໄດ້ການຕັ້ງຄ່າມຸມອຽງສູງສຸດ. ນີ້ຕັດສິນກໍານົດການຕັ້ງຄ່າມຸມມ້ວນ / pitch ໄດ້ສູງສຸດ quadcopter ຈະ tilt. ໃນກິລາແບບວ່າມັນປ່ຽນແປງອັດຕະໂນມັດໄດ້ຊົງອ່ອນໄຫວ. ສູງຂຶ້ນໃນການປັບຄ່າໄດ້ຜົນບັງຄັບໃຊ້ຫຼາຍຖືກນໍາໃຊ້ເພື່ອສະຖຽນລະພາບ quadcopter ໄດ້.
18) ຮູບແບບ 3d Acro / Acro ສໍາລັບການບິນຊ່ຽວຊານ
ອັດຕະໂນມັດຄົງຈະບໍ່ໄດ້ຖືກນໍາໃຊ້ໃນທິບາຍຮູບແບບການເຫຼົ່ານີ້. ທ່ານຈໍາເປັນຕ້ອງເປັນຜູ້ຊ່ຽວຊານການບິນຢູ່ໃນນີ້ mode.In ຮູບແບບ 3D ເປັນຮູບແບບທີ່ Quadcopter ສາມາດບິນ upside ລົງຍັງ. ການຕິດ throttle ຈະຜະລິດໄດ້ຢ່າງສິ້ນເຊີງ thrust ໃນເວລາທີ່ໄດ້ຍົກຍ້າຍລົງຈາກຕໍາແຫນ່ງໃນສູນກາງ.
ມີຄວາມສຸກເກມບິນ ..
ສິນເຊື່ອ: ມີບາງເນື້ອໃນ Arteria ເປັນໃນການນໍາໃຊ້.
ໃນປັດຈຸບັນກູໂກ Cardboard VR ແມ່ນສະຫນັບສະຫນູນສໍາລັບການບິນ immersive ແລະປະສົບການ FPV.
ສະຫນັບສະຫນູນສໍາລັບການຄວບຄຸມ
ກະລຸນາສັງເກດວ່າ simulator ເປັນແລະບໍ່ນີ້ເກມໄດ້. ມັນໄດ້ຖືກອອກແບບສໍາລັບ enthusiasts RC ການຝຶກທັກເກມບິນ.
Tutorial ພື້ນຖານສໍາລັບຜູ້ເລີ່ມເປັນໃນວິດີໂອອະທິບາຍຂ້າງເທິງນີ້.
ຄວາມລະອຽດຂອງຫນ້າຈໍທີ່ຕ້ອງການຕໍາ່ສຸດທີ່ເປັນ 800 x 480 px. RAM ແນະນໍາຂັ້ນຕ່ໍາ 1 GB. ພວກເຮົາແມ່ນເປີດໃຫ້ຄໍາແນະນໍາແລະບັນຫາ. ທ່ານສະເຫມີສາມາດສົ່ງອີເມວຫາພວກເຮົາທີ່ອີເມວສະຫນັບສະຫນູນຂອງພວກເຮົາ.
ຄຸນນະສົມບັດ:
1) ອີງຕາມຕົວແບບທີ່ແທ້ຈິງຟີຊິກຂອງ Quadcopter
2) ການຄັດເລືອກຕິດຕໍ່ພົວພັນຂອງທິບາຍຮູບແບບທີ່ແຕກຕ່າງກັນກ້ອງຖ່າຍຮູບ:
* ກ້ອງລະດັບຂອງຕາ
* ຄົນທໍາອິດເບິ່ງກ້ອງຖ່າຍຮູບ
* Stabilized ກ້ອງ Gimbal
* ປະຕິບັດຕາມກ້ອງ
ທ່ານສາມາດຍ່າງປະມານໃນຂະນະທີ່ເກມບິນ, ຊອກຫາຢູ່ໃນ quad ໄດ້ບໍ່ວ່າຈະໂດຍການຍ້າຍເຄິ່ງກາງຂອງຫນ້າຈໍໄດ້ຫລືໂດຍການເຮັດໃຫ້ປຸ່ມ accelerometer ໃນເບື້ອງຊ້າຍໃນຕາ Mode ກ້ອງລະດັບ ..
3) ກັບຄືນໄປສະຖານທີ່ (RTL)
ໃນເວລາທີ່ສຸດ Quad ອັດຕະໂນມັດຈະກັບຄືນແລະກັບຄືນໄປບ່ອນທີ່ດິນໃນຕໍາແຫນ່ງທີ່ດິນຂອງຕົນ. ມັນອັດຕະໂນມັດຈະສະຫຼັບໃນເວລາທີ່ Quad ໄດ້ໄປອອກຈາກລະດັບ.
4) ຕໍາແຫນ່ງຖື
ໃນເວລາທີ່ ON Quad ຈະພະຍາຍາມທີ່ຈະຖືຕໍາແຫນ່ງຂອງຕົນໃນເວລາທີ່ທັງສອງໄມ້ການຄວບຄຸມຖືກປ່ອຍອອກມາ.
5) ຂອງລາຍວິຊາ Lock
ໃນເວລາທີ່ສຸດໄປຂ້າງຫນ້າໄດ້, ຖອຍຫລັງ, ຊ້າຍແລະຂວາຈະຍັງຄົງຄືບໍ່ສົນເລື່ອງຂອງປະຖົມນິເທດຂອງ Quad. ຕົວຢ່າງ: ການເຄື່ອນຍ້າຍໄມ້ສິດທິໃນຂ້າງຫນ້າສະເຫມີຈະເຮັດໃຫ້ Quad ກ້າວໄປຂ້າງຫນ້າໃນທິດທາງຕາເວັນອອກເຖິງແມ່ນວ່າການຊີ້ຂອງຕົນໄປສູ່ພາກເຫນືອ.
6) Home Lock
ໃນເວລາທີ່ສຸດໄປຂ້າງຫນ້າໄດ້ສະເຫມີຈະໄປຈາກທ່ານແລະຫລັງສະເຫມີຈະມີຕໍ່ທ່ານໂດຍບໍ່ສົນເລື່ອງຂອງປະຖົມນິເທດ Quads.
7) ຫົວຫນ້າສະແດງຜົນ (HUD)
ການສະແດງທີ່ໃຊ້ເວລາທີ່ແທ້ຈິງ Pitch, ມ້ວນ, ຫົວລະດັບສູງ, ແລະຄວາມໄວ.
8) ການຕັ້ງຄ່າທີ່ລະອຽດອ່ອນຄວບຄຸມປັບ
9) ອັດຕະໂນມັດຄົງທີ່ຕັ້ງ
10) ຖືລະດັບຄວາມສູງສະ
ຖ້າ ON quad ໄດ້ຈະພະຍາຍາມທີ່ຈະຮັກສາລະດັບຄວາມສູງໃນເວລາທີ່ໄດ້ມີການເປີດ.
11) ການຕັ້ງຄ່າຂັ້ນສູງ
ຖ້າຫາກຜູ້ໃຊ້ເຮັດໃຫ້ສາມາດມີການປ່ຽນແປງໃນນ້ໍາຫນັກທັງຫມົດ, Static / thrust ແບບເຄື່ອນໄຫວ, ທີ່ຕັ້ງ PID ແລະຄ່າ Drag Aerodynamic.
12) ການຄັດເລືອກ Quad / Scene ຫຼາຍ / ບາງສິ່ງທ້າທາຍຂັ້ນພື້ນຖານສໍາລັບການທີ່ໃຊ້ເວລາຜ່ານ ..
13) ເພີ່ມການສະຫນັບສະຫນູນເຂົ້າຮູບແບບ.
ໃນປັດຈຸບັນມັນສະຫນັບສະຫນູນ mode1 Mode2,. mode3, mode4 ແລະ accelerometers. ທ່ານສາມາດມີການປ່ຽນແປງໂດຍຜ່ານການປັບຄ່າຫນ້າ
14) ພືດຫມູນວຽນກ້ອງໃນ FPV ແລະກ້ອງຖ່າຍຮູບ Gimbal.
ກົດແລະ drag ຈາກໃຈກາງຂອງຫນ້າຈໍສຸດ FPV ຫຼືກ້ອງຖ່າຍຮູບ Gimbal. Double ການຄລິກຢູ່ໃຈກາງການປັບ.
15) ພະລັງງານລົມແບບເຄື່ອນໄຫວ
ຜົນກະທົບພະລັງງານລົມຈະຫຼຸດຜ່ອນການໃນເວລາທີ່ທາງຫລັງຂອງການກໍ່ສ້າງ.
16) ສະຫນັບສະຫນູນ cardboard ກູໂກສໍາລັບຄວາມເປັນຈິງແລ້ວ virtual immersive ແລະປະສົບການ FPV.
ໃຫ້ແນ່ໃຈວ່າທ່ານມີການຄວບຄຸມຕິດກັບອຸປະກອນໄດ້ເນື່ອງຈາກວ່າວິທີທີ່ພຽງແຕ່ທ່ານສາມາດຄວບຄຸມ quadcopter ແມ່ນໂດຍການຄວບຄຸມຄັ້ງກະດາດ VR ຖືກເປີດໃຫ້ໃຊ້ງານ. ຫຼັງຈາກທີ່ເຮັດໃຫ້ທ່ານມີທີ່ຈະຈ້ອງເບິ່ງຢູ່ປຸ່ມຕ່າງໆກ່ຽວກັບ UI ການແລະກົດປຸ່ມຜົນກະທົບຕໍ່ໃນ cardboard ທີ່ຈະໃຫ້ຄລິກໃສ່ມັນ. ເມື່ອທ່ານກໍາລັງເກມບິນຫຼັງຈາກນັ້ນກົດຜົນກະທົບໄດ້ທຸກບ່ອນຈະເປີດຫນ້າການຕັ້ງຄ່າ. ນອກນັ້ນທ່ານຍັງສາມາດສໍາຜັດຫນ້າຈໍໄດ້ທຸກທີ່ຈະປະຕິບັດກໍລະນີຜົນກະທົບຕໍ່ແທນທີ່ຈະກົດປຸ່ມຜົນກະທົບຕໍ່.
17) ນ້ໍາອຽງ Angle / ອັດຕະໂນມັດຄົງທີ່ລະອຽດອ່ອນ Slider
ໃນ Normal Mode ເລື່ອນການປ່ຽນແປງໄດ້ການຕັ້ງຄ່າມຸມອຽງສູງສຸດ. ນີ້ຕັດສິນກໍານົດການຕັ້ງຄ່າມຸມມ້ວນ / pitch ໄດ້ສູງສຸດ quadcopter ຈະ tilt. ໃນກິລາແບບວ່າມັນປ່ຽນແປງອັດຕະໂນມັດໄດ້ຊົງອ່ອນໄຫວ. ສູງຂຶ້ນໃນການປັບຄ່າໄດ້ຜົນບັງຄັບໃຊ້ຫຼາຍຖືກນໍາໃຊ້ເພື່ອສະຖຽນລະພາບ quadcopter ໄດ້.
18) ຮູບແບບ 3d Acro / Acro ສໍາລັບການບິນຊ່ຽວຊານ
ອັດຕະໂນມັດຄົງຈະບໍ່ໄດ້ຖືກນໍາໃຊ້ໃນທິບາຍຮູບແບບການເຫຼົ່ານີ້. ທ່ານຈໍາເປັນຕ້ອງເປັນຜູ້ຊ່ຽວຊານການບິນຢູ່ໃນນີ້ mode.In ຮູບແບບ 3D ເປັນຮູບແບບທີ່ Quadcopter ສາມາດບິນ upside ລົງຍັງ. ການຕິດ throttle ຈະຜະລິດໄດ້ຢ່າງສິ້ນເຊີງ thrust ໃນເວລາທີ່ໄດ້ຍົກຍ້າຍລົງຈາກຕໍາແຫນ່ງໃນສູນກາງ.
ມີຄວາມສຸກເກມບິນ ..
ສິນເຊື່ອ: ມີບາງເນື້ອໃນ Arteria ເປັນໃນການນໍາໃຊ້.
ອັບເດດແລ້ວເມື່ອ
ຄວາມປອດໄພເລີ່ມດ້ວຍການເຂົ້າໃຈວ່ານັກພັດທະນາເກັບກຳ ແລະ ແບ່ງປັນຂໍ້ມູນຂອງທ່ານແນວໃດ. ວິທີປະຕິບັດກ່ຽວກັບຄວາມເປັນສ່ວນຕົວ ແລະ ຄວາມປອດໄພຂອງຂໍ້ມູນອາດຈະແຕກຕ່າງກັນອີງຕາມການນຳໃຊ້, ພາກພື້ນ ແລະ ອາຍຸຂອງທ່ານ. ນັກພັດທະນາໃຫ້ຂໍ້ມູນນີ້ ແລະ ອາດຈະອັບເດດມັນເມື່ອເວລາຜ່ານໄປ.

ບໍ່ໄດ້ໄດ້ແບ່ງປັນຂໍ້ມູນກັບພາກສ່ວນທີສາມ
ສຶກສາເພີ່ມເຕີມ ກ່ຽວກັບວ່ານັກພັດທະນາປະກາດການແບ່ງປັນຂໍ້ມູນແນວໃດ

ບໍ່ໄດ້ເກັບກຳຂໍ້ມູນ
ສຶກສາເພີ່ມເຕີມ ກ່ຽວກັບວ່ານັກພັດທະນາປະກາດການເກັບກຳຂໍ້ມູນແນວໃດ
ການຈັດອັນດັບ ແລະ ຄຳຕິຊົມ
4,0
19,7 ພັນ ຄຳຕິຊົມ
ຝ່າຍຊ່ວຍເຫຼືອຂອງແອັບ
ກ່ຽວກັບນັກພັດທະນາແອັບ
3D CREATIVE WORLD
First Floor, D 96, Village Munirka
New Delhi, Delhi 110067
India
+91 88022 88868





