
Quadcopter FX Simulator Pro

४.७star
५८९ परीक्षणinfo
१० ह+
डाउनलोड

PEGI 3
info








या गेमबद्दल
प्रथम व्यक्ती पहा (FPV), HUD, परत मुख्यपृष्ठ अभ्यासक्रम लॉक, घर लॉक, कॅमेरा Gimbal, अॅक्रो मोड, अॅक्रो 3D मोड आणि अधिक एक Quadcopter / Multirotor आर.सी. आळशी सिम्युलेटर ..
आता Google पुठ्ठा आर देखील व्यस्त उडणाऱ्या आणि FPV अनुभव करीता समर्थीत आहे.
कंट्रोलर्सकरिता सपोर्ट
हे आमच्या QuadcopterFX सिम्युलेटर एक प्रो आवृत्ती आहे. नो-inapp खरेदी आहेत. सर्व काही खूपच कमी खर्च सक्षम आहे. प्रथम वेळ वापरकर्ते प्रत्येक गोष्ट चांगले काम करते की नाही हे पाहण्यासाठी आमच्या मोफत Quadcopter FX सिम्युलेटर प्रयत्न करू शकता.
/store/apps/details?id=com.Creativeworld.QuadcopterFX
आवश्यक किमान स्क्रीन रिझोल्यूशनमध्ये 800 नाम 480 पीएक्स आहे. किमान सूचविलेले RAM आपण यशस्वीरित्या 512 एमबी मेंढा चालत ते पाहिले आहे जरी 1 जीबी आहे. आम्ही सूचना आणि समस्या खुल्या आहेत. आपण नेहमी आमच्या समर्थन ईमेल आम्हाला ईमेल करू शकता.
वैशिष्ट्ये:
1) Quadcopter वास्तविक भौतिकशास्त्र मॉडेल आधारित
विविध कॅमेरे रीती 2) संवादी निवड:
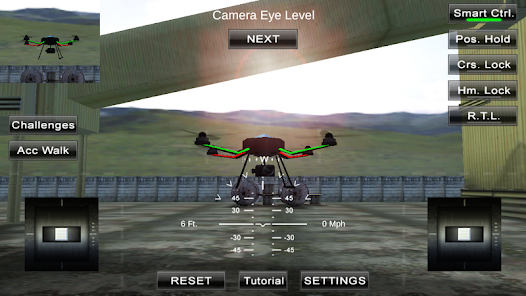
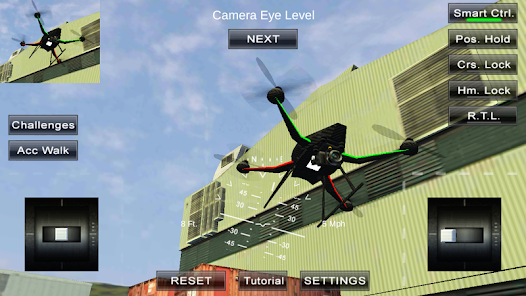
* नेत्र पातळी कॅमेरा
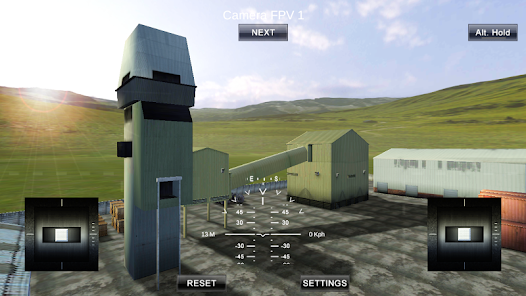
* प्रथम व्यक्ती पहा कॅमेरा
* स्थीर Gimbal कॅमेरा
* अनुसरण कॅमेरा
स्क्रीन मध्यभागी ड्रॅग किंवा नेत्र पातळी कॅमेरा मोड मध्ये डाव्या बाजूला एक्सीलरोमीटरचा बटण सक्षम करून एकतर तुरुंग बघत, उड्डाण करणारे हवाई करताना आपण सुमारे चालणे शकता ..
स्थान 3) परत (RTL)
तेव्हा चतुर्भुज आपोआप परत या आणि जमीन परत त्याच्या किनाऱ्यावर किंवा जमिनीवर आगमन स्थितीत आहे. हे स्वयंचलितपणे चतुर्भुज श्रेणी सोडून बाहेर निघून जातो तेव्हा स्विच होईल.
4) स्थिती दाबून ठेवा
तेव्हा चतुर्भुज दोन्ही नियंत्रण रन प्रकाशीत केल्यावर त्याचे स्थान ठेवण्यासाठी प्रयत्न करेल.
5) कोर्स लॉक
तेव्हा पुढे, मागासवर्गीय, डाव्या आणि उजव्या पर्वा न करता चतुर्भुज दिशा समान राहील. उदाहरणार्थ हलवित अधिकार काठी फॉरवर्ड नेहमी चतुर्भुज व उत्तर दिशेने दिशेला जरी पूर्व दिशा पुढे जाईन. '
6) मुख्यपृष्ठ लॉक
तेव्हा पुढे नेहमी दूर आपण असेल आणि बॅकवर्ड नेहमी पर्वा न करता Quads प्रवृत्ती आपण दिशेने असेल.
7) प्रदर्शन सावधान (HUD)
रिअल-टाइम खेळपट्टीवर, रोल, शीर्षक, उंची आणि गती दाखवत आहे.
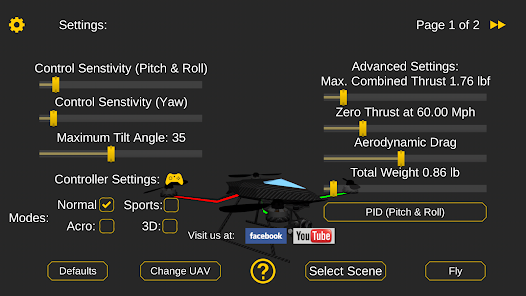
8) बदलानुकारी नियंत्रण संवेदनशीलता सेटिंग्ज
9) ऑटो बदलानुकारी स्थिर
10) उंची दाबून ठेवा स्विच
तुरुंग वर असेल तर तो स्वीच ऑन होते तेव्हा समुद्रसपाटीपासूनची उंची राखण्यासाठी प्रयत्न करेल.
11) प्रगत सेटिंग्ज
सक्षम वापरकर्ते एकूण वजन, स्टॅटिक / डायनॅमिक खुपसणे, पी आय डी सेटिंग आणि वायुगतिशास्त्रीय ड्रॅग मूल्ये बदलू शकता, तर.
12) अनेक चतुर्भुज / दृश्य निवड / वेळ पास साठी काही मूलभूत आव्हाने ..
13) अनेक मोड इनपुट समर्थन.
आता तो mode1, mode2 समर्थन पुरवतो. mode3, mode4 आणि accelerometers. आपण सेटिंग्ज पृष्ठ द्वारा बदलू शकता
FPV आणि Gimbal कॅमेरा मध्ये 14) कॅमेरा रोटेशन.
क्लिक करा आणि FPV किंवा Gimbal कॅमेरा स्क्रीन मध्यभागी पासून ड्रॅग करा. मध्यभागी डबल क्लिक करा रीसेट करण्यासाठी.
15) डायनॅमिक वारा
तेव्हा इमारत मागे वारा परिणाम कमी होईल.
व्यस्त आभासी वास्तव आणि FPV अनुभव 16) Google पुठ्ठा समर्थन.
पुठ्ठा आर सक्षम आहे एकदा आपण quadcopter नियंत्रित करू शकता एकमेव मार्ग कंट्रोलर आहे कारण आपण साधन संलग्न एक कंट्रोलर आहे याची खात्री करा. सक्षम केल्यानंतर आपण केलेल्या UI बटणे येथे पाहतील आणि क्लिक करा पुठ्ठा वर ट्रिगर बटन दाबा. आपण सेटिंग्ज पृष्ठ उघडेल कुठेही ट्रिगर दाबून नंतर उड्डाण करणारे हवाई परिवहन एकदा. आपण ट्रिगर बटण दाबून ऐवजी ट्रिगर कार्यक्रम कार्यान्वित करण्यासाठी स्क्रीन वर कुठेही स्पर्श करू शकता.
17) कमाल झुकवा कोन / ऑटो संवेदनशीलता स्लायडर स्थिर
सामान्य मोड मध्ये स्लायडर कमाल झुकवा कोन सेटिंग बदलते. ही सेटिंग्ज quadcopter तिरपा होईल जास्तीत जास्त रोल / खेळपट्टीवर कोन ठरवते. क्रीडा मोड मध्ये ऑटो संवेदनशीलता स्थिर बदलते. उच्च सेटिंग्ज अधिक शक्ती quadcopter स्थिर लागू आहे.
तज्ज्ञ उडणाऱ्या 18) अॅक्रो / अॅक्रो 3 डी मोडमध्ये
ऑटो या रीती लागू होणार नाही स्थिर. आपण या mode.In 3D मोड मध्ये उडणे तज्ज्ञ असणे आवश्यक आहे Quadcopter देखील वरची बाजू खाली करणारे हवाई परिवहन ज्या मोड आहे. केंद्र स्थान खाली हलविले तेव्हा गळा रन उत्पादन मुसंडी उलटा होईल.
फ्लाइंग आनंद घ्या ..
क्रेडिट: काही Arteria सामग्री वापरात आहे.
आता Google पुठ्ठा आर देखील व्यस्त उडणाऱ्या आणि FPV अनुभव करीता समर्थीत आहे.
कंट्रोलर्सकरिता सपोर्ट
हे आमच्या QuadcopterFX सिम्युलेटर एक प्रो आवृत्ती आहे. नो-inapp खरेदी आहेत. सर्व काही खूपच कमी खर्च सक्षम आहे. प्रथम वेळ वापरकर्ते प्रत्येक गोष्ट चांगले काम करते की नाही हे पाहण्यासाठी आमच्या मोफत Quadcopter FX सिम्युलेटर प्रयत्न करू शकता.
/store/apps/details?id=com.Creativeworld.QuadcopterFX
आवश्यक किमान स्क्रीन रिझोल्यूशनमध्ये 800 नाम 480 पीएक्स आहे. किमान सूचविलेले RAM आपण यशस्वीरित्या 512 एमबी मेंढा चालत ते पाहिले आहे जरी 1 जीबी आहे. आम्ही सूचना आणि समस्या खुल्या आहेत. आपण नेहमी आमच्या समर्थन ईमेल आम्हाला ईमेल करू शकता.
वैशिष्ट्ये:
1) Quadcopter वास्तविक भौतिकशास्त्र मॉडेल आधारित
विविध कॅमेरे रीती 2) संवादी निवड:
* नेत्र पातळी कॅमेरा
* प्रथम व्यक्ती पहा कॅमेरा
* स्थीर Gimbal कॅमेरा
* अनुसरण कॅमेरा
स्क्रीन मध्यभागी ड्रॅग किंवा नेत्र पातळी कॅमेरा मोड मध्ये डाव्या बाजूला एक्सीलरोमीटरचा बटण सक्षम करून एकतर तुरुंग बघत, उड्डाण करणारे हवाई करताना आपण सुमारे चालणे शकता ..
स्थान 3) परत (RTL)
तेव्हा चतुर्भुज आपोआप परत या आणि जमीन परत त्याच्या किनाऱ्यावर किंवा जमिनीवर आगमन स्थितीत आहे. हे स्वयंचलितपणे चतुर्भुज श्रेणी सोडून बाहेर निघून जातो तेव्हा स्विच होईल.
4) स्थिती दाबून ठेवा
तेव्हा चतुर्भुज दोन्ही नियंत्रण रन प्रकाशीत केल्यावर त्याचे स्थान ठेवण्यासाठी प्रयत्न करेल.
5) कोर्स लॉक
तेव्हा पुढे, मागासवर्गीय, डाव्या आणि उजव्या पर्वा न करता चतुर्भुज दिशा समान राहील. उदाहरणार्थ हलवित अधिकार काठी फॉरवर्ड नेहमी चतुर्भुज व उत्तर दिशेने दिशेला जरी पूर्व दिशा पुढे जाईन. '
6) मुख्यपृष्ठ लॉक
तेव्हा पुढे नेहमी दूर आपण असेल आणि बॅकवर्ड नेहमी पर्वा न करता Quads प्रवृत्ती आपण दिशेने असेल.
7) प्रदर्शन सावधान (HUD)
रिअल-टाइम खेळपट्टीवर, रोल, शीर्षक, उंची आणि गती दाखवत आहे.
8) बदलानुकारी नियंत्रण संवेदनशीलता सेटिंग्ज
9) ऑटो बदलानुकारी स्थिर
10) उंची दाबून ठेवा स्विच
तुरुंग वर असेल तर तो स्वीच ऑन होते तेव्हा समुद्रसपाटीपासूनची उंची राखण्यासाठी प्रयत्न करेल.
11) प्रगत सेटिंग्ज
सक्षम वापरकर्ते एकूण वजन, स्टॅटिक / डायनॅमिक खुपसणे, पी आय डी सेटिंग आणि वायुगतिशास्त्रीय ड्रॅग मूल्ये बदलू शकता, तर.
12) अनेक चतुर्भुज / दृश्य निवड / वेळ पास साठी काही मूलभूत आव्हाने ..
13) अनेक मोड इनपुट समर्थन.
आता तो mode1, mode2 समर्थन पुरवतो. mode3, mode4 आणि accelerometers. आपण सेटिंग्ज पृष्ठ द्वारा बदलू शकता
FPV आणि Gimbal कॅमेरा मध्ये 14) कॅमेरा रोटेशन.
क्लिक करा आणि FPV किंवा Gimbal कॅमेरा स्क्रीन मध्यभागी पासून ड्रॅग करा. मध्यभागी डबल क्लिक करा रीसेट करण्यासाठी.
15) डायनॅमिक वारा
तेव्हा इमारत मागे वारा परिणाम कमी होईल.
व्यस्त आभासी वास्तव आणि FPV अनुभव 16) Google पुठ्ठा समर्थन.
पुठ्ठा आर सक्षम आहे एकदा आपण quadcopter नियंत्रित करू शकता एकमेव मार्ग कंट्रोलर आहे कारण आपण साधन संलग्न एक कंट्रोलर आहे याची खात्री करा. सक्षम केल्यानंतर आपण केलेल्या UI बटणे येथे पाहतील आणि क्लिक करा पुठ्ठा वर ट्रिगर बटन दाबा. आपण सेटिंग्ज पृष्ठ उघडेल कुठेही ट्रिगर दाबून नंतर उड्डाण करणारे हवाई परिवहन एकदा. आपण ट्रिगर बटण दाबून ऐवजी ट्रिगर कार्यक्रम कार्यान्वित करण्यासाठी स्क्रीन वर कुठेही स्पर्श करू शकता.
17) कमाल झुकवा कोन / ऑटो संवेदनशीलता स्लायडर स्थिर
सामान्य मोड मध्ये स्लायडर कमाल झुकवा कोन सेटिंग बदलते. ही सेटिंग्ज quadcopter तिरपा होईल जास्तीत जास्त रोल / खेळपट्टीवर कोन ठरवते. क्रीडा मोड मध्ये ऑटो संवेदनशीलता स्थिर बदलते. उच्च सेटिंग्ज अधिक शक्ती quadcopter स्थिर लागू आहे.
तज्ज्ञ उडणाऱ्या 18) अॅक्रो / अॅक्रो 3 डी मोडमध्ये
ऑटो या रीती लागू होणार नाही स्थिर. आपण या mode.In 3D मोड मध्ये उडणे तज्ज्ञ असणे आवश्यक आहे Quadcopter देखील वरची बाजू खाली करणारे हवाई परिवहन ज्या मोड आहे. केंद्र स्थान खाली हलविले तेव्हा गळा रन उत्पादन मुसंडी उलटा होईल.
फ्लाइंग आनंद घ्या ..
क्रेडिट: काही Arteria सामग्री वापरात आहे.
या रोजी अपडेट केले
डेव्हलपर तुमचा डेटा कसा गोळा करतात आणि शेअर करतात हे समजून घेण्यापासून सुरक्षितता सुरू होते. तुमचा वापर, प्रदेश आणि वय यांच्या आधारे डेटा गोपनीयता व सुरक्षेशी संबंधित पद्धती बदलू शकतात. डेव्हलपरने ही माहिती पुरवली आहे आणि ती कालांतराने अपडेट केली जाऊ शकते.

तृतीय पक्षांसोबत कोणताही डेटा शेअर केलेला नाही
डेव्हलपर शेअर करण्याविषयी माहिती कशी घोषित करतात याविषयी अधिक जाणून घ्या

कोणताही डेटा गोळा केलेला नाही
डेव्हलपर डेटा गोळा करण्याविषयी माहिती कशी घोषित करतात याविषयी अधिक जाणून घ्या
रेटिंग आणि पुनरावलोकने
४.६
४७४ परीक्षणे
ॲप सपोर्ट
डेव्हलपर याविषयी
3D CREATIVE WORLD
First Floor, D 96, Village Munirka
New Delhi, Delhi 110067
India
+91 88022 88868


