
Quadcopter FX Simulator
應用程式內購買

4.0star
23.4K 則評論info
1M+
次下載

PEGI 3
info








關於本遊戲
一个四轴/ RC多转子雄蜂模拟器第一人称视角(FPV),HUD,返回首页,场锁定,锁定主页,摄像头万向,艾可模式,艾可3D模式以及更多......
现在,谷歌纸板VR还支持身临其境的飞行和FPV的经验。
对于控制器的支持
请注意,这是一个模拟器,而不是一个游戏。它是专为RC爱好者练习飞行技巧。
初学者基础教程是在上面的说明视频。
所需的最低屏幕分辨率为800×480像素。最低推荐RAM为1 GB。我们是开放的建议和问题。你总是可以在我们的支持电子邮件给我们发电子邮件。
特征:
1)基于四轴飞行器的真实的物理模型
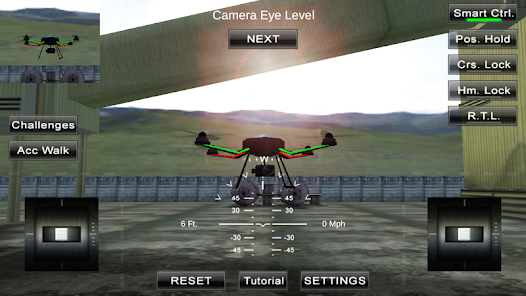
2)不同的相机模式的交互式选择:
*眼级相机
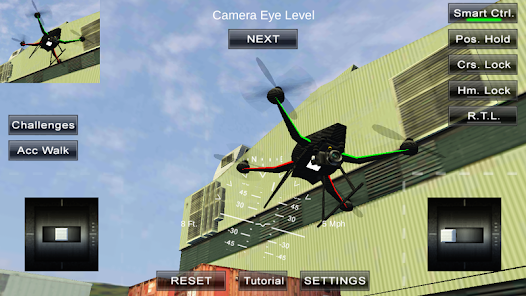
*第一人称视摄像头
*稳定万向摄像头
*根据相机
你可以走动飞行时,可以通过拖动屏幕中间或启用左侧的眼睛级别相机模式按钮加速度看着四..
3)返回到位置(RTL)
当在四会自动返回,并在其着陆位置的土地了。它会在四超出范围的自动切换。
4)位置保持
当在四会尽量保持它的位置两个控制棒时被释放。
5)课程锁
当上了前进,后退,左和右将保持相同,而四核的取向。例如移动右摇杆向前总会使四前进东亚方向,即使其对北指指点点。
6)首页锁定
当在前进总是会远离你和向后永远是对你不管四边形定位。
7)抬头显示器(HUD)
显示实时俯仰,滚转航向,高度和速度。
8)可调节控制灵敏度设置
9)自动调节稳定
10)高度锁定开关
如果在四会尽量保持高度,当它被打开。
11)高级设置
如果启用,用户可以更改的总重量,静态/动态推力,PID设置和气动阻力值。
12)多四核/场景选择/对的时间通过一些基本的挑战..
13)多模式输入的支持。
现在,它支持模式1,模式2。模式3,模式4和加速度计。您可以通过设置页面更改
14)在FPV和万向摄像头摄像头转动。
单击并从FPV或万向相机屏幕中心拖动。在中心双击即可重置。
15)动态风
风的影响将在大楼后面的时候减少。
16),谷歌纸板支持沉浸式虚拟现实和FPV的经验。
请确保您有连接到该设备的控制器,因为一旦纸板VR启用就可以控制四轴飞行器的唯一途径是由控制器。启用后,您必须在UI上的按钮来凝视,然后按在纸板上的触发按钮点击它。一旦你飞然后按触发的任何位置将打开设置页面。您也可以通过触摸屏幕上的任何地方,而不是执行按下触发按钮触发事件。
17)最大倾角/自动稳定灵敏度滑块
在正常模式下滑块改变最大倾斜角设置。此设置决定了最大侧倾/俯仰角的四轴飞行器将倾斜。在运动模式下它的变化自动稳定灵敏度。较高的设置更大的力被施加到稳定的四轴飞行器。
18)艾可/艾可3D模式下飞行专家
自动稳定不会在这些模式被应用。你需要专家在此mode.In 3D模式飞行模式是其中四轴飞行器能飞倒挂也。当从中心位置向下移动节流棒将产生反推力。
享受飞..
积分:有些内容动脉正在使用中。
现在,谷歌纸板VR还支持身临其境的飞行和FPV的经验。
对于控制器的支持
请注意,这是一个模拟器,而不是一个游戏。它是专为RC爱好者练习飞行技巧。
初学者基础教程是在上面的说明视频。
所需的最低屏幕分辨率为800×480像素。最低推荐RAM为1 GB。我们是开放的建议和问题。你总是可以在我们的支持电子邮件给我们发电子邮件。
特征:
1)基于四轴飞行器的真实的物理模型
2)不同的相机模式的交互式选择:
*眼级相机
*第一人称视摄像头
*稳定万向摄像头
*根据相机
你可以走动飞行时,可以通过拖动屏幕中间或启用左侧的眼睛级别相机模式按钮加速度看着四..
3)返回到位置(RTL)
当在四会自动返回,并在其着陆位置的土地了。它会在四超出范围的自动切换。
4)位置保持
当在四会尽量保持它的位置两个控制棒时被释放。
5)课程锁
当上了前进,后退,左和右将保持相同,而四核的取向。例如移动右摇杆向前总会使四前进东亚方向,即使其对北指指点点。
6)首页锁定
当在前进总是会远离你和向后永远是对你不管四边形定位。
7)抬头显示器(HUD)
显示实时俯仰,滚转航向,高度和速度。
8)可调节控制灵敏度设置
9)自动调节稳定
10)高度锁定开关
如果在四会尽量保持高度,当它被打开。
11)高级设置
如果启用,用户可以更改的总重量,静态/动态推力,PID设置和气动阻力值。
12)多四核/场景选择/对的时间通过一些基本的挑战..
13)多模式输入的支持。
现在,它支持模式1,模式2。模式3,模式4和加速度计。您可以通过设置页面更改
14)在FPV和万向摄像头摄像头转动。
单击并从FPV或万向相机屏幕中心拖动。在中心双击即可重置。
15)动态风
风的影响将在大楼后面的时候减少。
16),谷歌纸板支持沉浸式虚拟现实和FPV的经验。
请确保您有连接到该设备的控制器,因为一旦纸板VR启用就可以控制四轴飞行器的唯一途径是由控制器。启用后,您必须在UI上的按钮来凝视,然后按在纸板上的触发按钮点击它。一旦你飞然后按触发的任何位置将打开设置页面。您也可以通过触摸屏幕上的任何地方,而不是执行按下触发按钮触发事件。
17)最大倾角/自动稳定灵敏度滑块
在正常模式下滑块改变最大倾斜角设置。此设置决定了最大侧倾/俯仰角的四轴飞行器将倾斜。在运动模式下它的变化自动稳定灵敏度。较高的设置更大的力被施加到稳定的四轴飞行器。
18)艾可/艾可3D模式下飞行专家
自动稳定不会在这些模式被应用。你需要专家在此mode.In 3D模式飞行模式是其中四轴飞行器能飞倒挂也。当从中心位置向下移动节流棒将产生反推力。
享受飞..
积分:有些内容动脉正在使用中。
更新日期


評分和評論
4.0
19.7K 則評論

Google 使用者
- 舉報不當內容
2019年2月19日
擬真度很高,但好像無法摸擬鏡頭穩定效果? 空拍機都會穩定畫面,不會一橫移畫面就轉動
8 人認為這篇評論有用

Wang Chigow
- 舉報不當內容
2022年11月7日
很好的練習軟件, good :)
Google 使用者
- 舉報不當內容
- 顯示評論記錄
2019年9月11日
很棒,可以切換視角
6 人認為這篇評論有用
應用程式支援
關於開發人員
3D CREATIVE WORLD
First Floor, D 96, Village Munirka
New Delhi, Delhi 110067
India
+91 88022 88868





